






DeepMind的MuZero算法继AlphaFold后走红,无需人类知识和规则,能通过分析环境与未知条件博弈。其极简实现含三个模型,通过强化学习训练。在CartPole-v0环境测试,经2000轮训练,模型可完美掌握游戏,展现出超越前代的潜力,未来计划在更多环境复现。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
继AlphaFold 大火之后,DeepMind 又一款算法蹿红。12 月 23 日,DeepMind 在官网发表博文 MuZero: Mastering Go, chess, shogi and Atari without rules,并详细介绍了这款名为 MuZero 的 AI 算法。
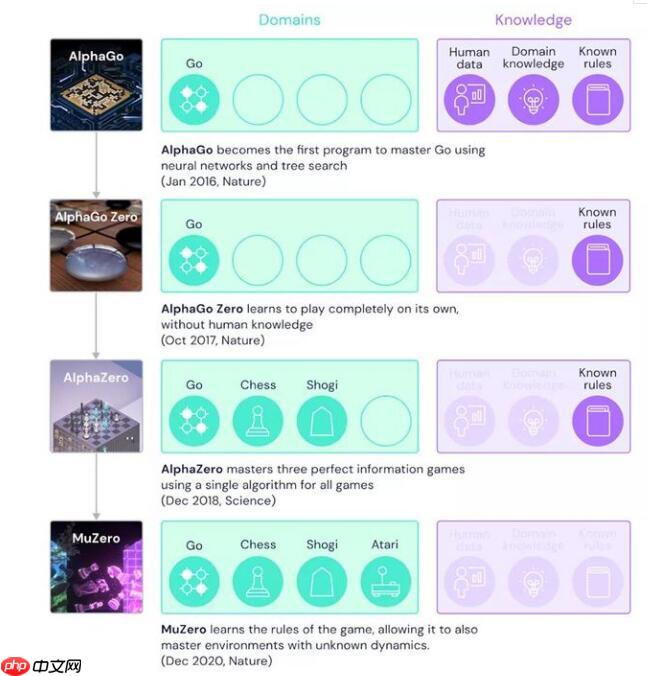
- AlphaGo 提供了人类知识(Human Knowledge)和规则(Rules),因此可训练出一个大的策略树,来完成搜索、以及帮助做出决策;
- AlphaGo Zero 去掉了人类知识部分,而是只给 AI 提供规则,然后通过自我博弈,就能学习出自己的策略;
- AlphaZero 则可通过完全信息,利用泛化能力更强的强化学习算法来做训练,并学会不同的游戏,如围棋、国际象棋和日本将棋。
- MuZero 则是前级阶段的升级版,即在没有人类知识以及规则的情况下,,它能通过分析环境和未知条件(Unknown Dynamics),来进行不同游戏的博弈。
本项目是一个极简的MuZero的实现,没有使用MCTS方法,模型由Representation_model、Dynamics_Model、Prediction_Model构成:

- Representation_model将一组观察值映射到神经网络的隐藏状态s;
- 动态Dynamics_Model根据动作a_(t + 1)将状态s_t映射到下一个状态s_(t + 1),同时估算在此过程的回报r_t,这样模型就能够不断向前扩展;
- 预测Prediction_Model 根据状态s_t对策略p_t和值v_t进行估计;
In [1]
import gymimport numpy as npimport paddleimport paddle.nn as nn
import paddle.optimizer as optimimport paddle.nn.functional as Fimport copyimport randomfrom tqdm import tqdmfrom collections import deque
env = gym.make('CartPole-v0')
hidden_dims = 128o_dim = env.observation_space.shape[0]
act_dim = env.action_space.n
Representation_model= paddle.nn.Sequential(
paddle.nn.Linear(
o_dim, 128),
paddle.nn.ELU(),
paddle.nn.Linear(128, hidden_dims),
)# paddle.summary(h, (50,4))class Dynamics_Model(paddle.nn.Layer):
# action encoding - one hot
def __init__(self, num_hidden, num_actions):
super().__init__()
self.num_hidden = num_hidden
self.num_actions = num_actions
network = [
nn.Linear(self.num_hidden+self.num_actions, self.num_hidden),
nn.ELU(),
nn.Linear(self.num_hidden,128),
]
self.network = nn.Sequential(*network)
self.hs = nn.Linear(128,self.num_hidden)
self.r = nn.Linear(128,1) def forward(self, hs,a):
out = paddle.concat(x=[hs, a], axis=-1)
out = self.network(out)
hidden =self.hs(out)
reward = self.r(out)
return hidden, reward# D = Dynamics_Model(hidden_dims,act_dim)# paddle.summary(D, [(2,hidden_dims),(2,2)])class Prediction_Model(paddle.nn.Layer):
def __init__(self, num_hidden, num_actions):
super().__init__()
self.num_actions = num_actions
self.num_hidden = num_hidden
network = [
nn.Linear(num_hidden, 128),
nn.ELU(),
nn.Linear(128, 128),
nn.ELU(),
]
self.network = nn.Sequential(*network)
self.pi = nn.Linear(128,self.num_actions)
self.soft = nn.Softmax()
self.v = nn.Linear(128,1) def forward(self, x):
out = self.network(x)
p = self.pi(out)
p =self.soft(p)
v = self.v(out)
return v, p
# P= Prediction_Model(hidden_dims,act_dim)# paddle.summary(P, [(32,hidden_dims)])class MuZero_Agent(paddle.nn.Layer):
def __init__(self,num_hidden ,num_actions):
super().__init__()
self.num_actions = num_actions
self.num_hidden = num_hidden
self.representation_model = Representation_model
self.dynamics_model = Dynamics_Model(self.num_hidden,self.num_actions)
self.prediction_model = Prediction_Model(self.num_hidden,self.num_actions)
def forward(self, s,a):
s_0 = self.representation_model(s)
s_1 ,r_1 = self.dynamics_model(s_0 , a)
value , p = self.prediction_model(s_1)
return r_1, value ,p
mu = MuZero_Agent(128,2)
mu.train()In [2]
buffer = deque(maxlen=500)def choose_action(env, evaluate=False):
values = [] # mu.eval()
for a in range(env.action_space.n):
e = copy.deepcopy(env)
o, r, d, _ = e.step(a)
act = np.zeros(env.action_space.n); act[a] = 1
state = paddle.to_tensor(list(e.state), dtype='float32')
action = paddle.to_tensor(act, dtype='float32') # print(state,action)
rew, v, pi = mu(state, action)
v = v.numpy()[0]
values.append(v) # mu.train()
if evaluate: return np.argmax(values) else: for i in range(len(values)): if values[i] < 0:
values[i] = 0
s = sum(values) if s == 0: return np.random.choice(values) for i in range(len(values)):
values[i] /= s # print(values)
return np.random.choice(range(env.action_space.n), p=values)
gamma = 0.997batch_size = 64 ##64evaluate = Falsescores = []
avg_scores = []
epochs = 2_000optim = paddle.optimizer.Adam(learning_rate=1e-3,parameters=mu.parameters())
mse_loss = nn.MSELoss()for episode in tqdm(range(epochs)):
obs = env.reset()
done = False
score = 0
while not done:
a = choose_action(env, evaluate=evaluate)
a_pi = np.zeros((env.action_space.n)); a_pi[a] = 1
obs_, r, done, _ = env.step(a)
score += r
buffer.append([obs, None, a_pi, r/200])
obs = obs_ #print(f'score: {score}')
scores.append(score) if len(scores) >= 100:
avg_scores.append(np.mean(scores[-100:])) else:
avg_scores.append(np.mean(scores))
cnt = score for i in range(len(buffer)): if buffer[i][1] == None:
buffer[i][1] = cnt / 200
cnt -= 1
assert(cnt == 0)
if len(buffer) >= batch_size:
batch = []
indexes = np.random.choice(len(buffer), batch_size, replace=False) for i in range(batch_size):
batch.append(buffer[indexes[i]])
states = paddle.to_tensor([transition[0] for transition in batch], dtype='float32')
values = paddle.to_tensor([transition[1] for transition in batch], dtype='float32')
values = paddle.reshape(values,[batch_size,-1])
policies = paddle.to_tensor([transition[2] for transition in batch], dtype='float32')
rewards = paddle.to_tensor([transition[3] for transition in batch], dtype='float32')
rewards = paddle.reshape(rewards,[batch_size,-1]) for _ in range(2): # mu.train_on_batch([states, policies], [rewards, values, policies])
rew, v, pi = mu(states, policies) # print("----rew---{}----v---{}----------pi---{}".format(rew, v, pi))
# print("----rewards---{}----values---{}----------policies---{}".format(rewards, values, policies))
policy_loss = -paddle.mean(paddle.sum(policies*paddle.log(pi), axis=1))
mse1 = mse_loss(rew, rewards)
mse2 =mse_loss(v,values) # print(mse1,mse2 ,policy_loss)
loss = paddle.add_n([policy_loss,mse1,mse2]) # print(loss)
loss.backward()
optim.step()
optim.clear_grad()100%|██████████| 2000/2000 [07:18<00:00, 4.56it/s]
In [ ]
# 模型保存model_state_dict = mu.state_dict() paddle.save(model_state_dict, "mu.pdparams")
In [4]
import matplotlib.pyplot as plt
plt.plot(scores)
plt.plot(avg_scores)
plt.xlabel('episode')
plt.legend(['scores', 'avg scores'])
plt.title('scores')
plt.ylim(0, 200)
plt.show()In [5]
# 模型测试 ,可以看到testing scores在100次测试中均为200,说明模型已经完全掌握了这个简单的游戏# 模型读取# model_state_dict = paddle.load("mu.pdparams")# mu.set_state_dict(model_state_dict)import matplotlib.pyplot as plt
tests = 100scores = []
mu.eval()for episode in range(tests):
obs = env.reset()
done = False
score = 0
while not done:
a = choose_action(env, evaluate=True)
obs_, r, done, _ = env.step(a)
score += r
obs = obs_
scores.append(score)
plt.plot(scores)
plt.title('testing scores')
plt.show()写在最后:
- MuZero 能够对规则、环境进行建模, 与此同时它还能学会规则,这就是它的最大创新。也是因为这个,MuZero的搜索空间变得更大,所以计算量会大大增加,但理论上仍旧是强化学习。
- 人类世界中的规则随时在变化,那么显然 Muzero 相比二代 AlphaZero 具有更好的生存能力。可以看到的是,Muzero 有潜力成为广泛使用的强化学习算法。
- 后续有计划在Atari、Gomoku、Tic-tac-toe 等环境下复现Muzero算法




























