Gomoku游戏比围棋或象棋简单得多,因此我们可以专注于AlphaZero的训练,在一台PC机上几个小时内就可以获得一个让你不可大意的AI模型——因为一不留心,AI就可能战胜了你。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
还记得令职业棋手都闻风丧胆的“阿尔法狗”么?这里有“阿尔法狗”的小兄弟——AlphaZero-Gomoku-PaddlePaddle,即我用飞桨框架2.0从零开始训练自己的AI模型,开启五子棋小游戏。

五子棋是一种两人对弈的纯策略型棋类游戏,通常双方分别使用黑白两色的棋子,轮流下在棋盘竖线与横线的交叉点上,先形成五子连线者获胜。五子棋容易上手,老少皆宜,而且趣味横生,引人入胜。
%%writefile AlphaZero_Gomoku_PaddlePaddle/policy_value_net_paddlepaddle.pyimport paddleimport numpy as npimport paddle.nn as nn
import paddle.nn.functional as Fclass Net(paddle.nn.Layer):
def __init__(self,board_width, board_height):
super(Net, self).__init__()
self.board_width = board_width
self.board_height = board_height # 公共网络层
self.conv1 = nn.Conv2D(in_channels=4,out_channels=32,kernel_size=3,padding=1)
self.conv2 = nn.Conv2D(in_channels=32,out_channels=64,kernel_size=3,padding=1)
self.conv3 = nn.Conv2D(in_channels=64,out_channels=128,kernel_size=3,padding=1) # 行动策略网络层
self.act_conv1 = nn.Conv2D(in_channels=128,out_channels=4,kernel_size=1,padding=0)
self.act_fc1 = nn.Linear(4*self.board_width*self.board_height,
self.board_width*self.board_height)
self.val_conv1 = nn.Conv2D(in_channels=128,out_channels=2,kernel_size=1,padding=0)
self.val_fc1 = nn.Linear(2*self.board_width*self.board_height, 64)
self.val_fc2 = nn.Linear(64, 1) def forward(self, inputs):
# 公共网络层
x = F.relu(self.conv1(inputs))
x = F.relu(self.conv2(x))
x = F.relu(self.conv3(x)) # 行动策略网络层
x_act = F.relu(self.act_conv1(x))
x_act = paddle.reshape(
x_act, [-1, 4 * self.board_height * self.board_width])
x_act = F.log_softmax(self.act_fc1(x_act))
# 状态价值网络层
x_val = F.relu(self.val_conv1(x))
x_val = paddle.reshape(
x_val, [-1, 2 * self.board_height * self.board_width])
x_val = F.relu(self.val_fc1(x_val))
x_val = F.tanh(self.val_fc2(x_val)) return x_act,x_valclass PolicyValueNet():
"""策略&值网络 """
def __init__(self, board_width, board_height,
model_file=None, use_gpu=True):
self.use_gpu = use_gpu
self.board_width = board_width
self.board_height = board_height
self.l2_const = 1e-3 # coef of l2 penalty
self.policy_value_net = Net(self.board_width, self.board_height)
self.optimizer = paddle.optimizer.Adam(learning_rate=0.02,
parameters=self.policy_value_net.parameters(), weight_decay=self.l2_const)
if model_file:
net_params = paddle.load(model_file)
self.policy_value_net.set_state_dict(net_params)
def policy_value(self, state_batch):
"""
input: a batch of states
output: a batch of action probabilities and state values
"""
# state_batch = paddle.to_tensor(np.ndarray(state_batch))
state_batch = paddle.to_tensor(state_batch)
log_act_probs, value = self.policy_value_net(state_batch)
act_probs = np.exp(log_act_probs.numpy()) return act_probs, value.numpy() def policy_value_fn(self, board):
"""
input: board
output: a list of (action, probability) tuples for each available
action and the score of the board state
"""
legal_positions = board.availables
current_state = np.ascontiguousarray(board.current_state().reshape(
-1, 4, self.board_width, self.board_height)).astype("float32")
# print(current_state.shape)
current_state = paddle.to_tensor(current_state)
log_act_probs, value = self.policy_value_net(current_state)
act_probs = np.exp(log_act_probs.numpy().flatten())
act_probs = zip(legal_positions, act_probs[legal_positions]) # value = value.numpy()
return act_probs, value.numpy() def train_step(self, state_batch, mcts_probs, winner_batch, lr=0.002):
"""perform a training step"""
# wrap in Variable
state_batch = paddle.to_tensor(state_batch)
mcts_probs = paddle.to_tensor(mcts_probs)
winner_batch = paddle.to_tensor(winner_batch) # zero the parameter gradients
self.optimizer.clear_gradients() # set learning rate
self.optimizer.set_lr(lr)
# forward
log_act_probs, value = self.policy_value_net(state_batch) # define the loss = (z - v)^2 - pi^T * log(p) + c||theta||^2
# Note: the L2 penalty is incorporated in optimizer
value = paddle.reshape(x=value, shape=[-1])
value_loss = F.mse_loss(input=value, label=winner_batch)
policy_loss = -paddle.mean(paddle.sum(mcts_probs*log_act_probs, axis=1))
loss = value_loss + policy_loss # backward and optimize
loss.backward()
self.optimizer.minimize(loss) # calc policy entropy, for monitoring only
entropy = -paddle.mean(
paddle.sum(paddle.exp(log_act_probs) * log_act_probs, axis=1)
) return loss.numpy(), entropy.numpy()[0]
def get_policy_param(self):
net_params = self.policy_value_net.state_dict() return net_params def save_model(self, model_file):
""" save model params to file """
net_params = self.get_policy_param() # get model params
paddle.save(net_params, model_file)Overwriting AlphaZero_Gomoku_PaddlePaddle/policy_value_net_paddlepaddle.py
在棋盘游戏中(现实生活中也是),玩家在决定下一步怎么走的时候往往会“多想几步”。AlphaGoZero也一样。我们用神经网络来选择最佳的下一步走法后,其余低概率的位置就被忽略掉了。像Minimax这一类传统的AI博弈树搜索算法效率都很低,因为这些算法在做出最终选择前需要穷尽每一种走法。即使是带有较少分支因子的游戏也会使其博弈搜索空间变得像是脱缰的野马似的难以驾驭。分支因子就是所有可能的走法的数量。这个数量会随着游戏的进行不断变化。因此,你可以试着计算一个平均分支因子数,国际象棋的平均分支因子是35,而围棋则是250。这意味着,在国际象棋中,仅走两步就有1,225(35²)种可能的棋面,而在围棋中,这个数字会变成62,500(250²)。现在,时代变了,神经网络将指导并告诉我们哪些博弈路径值得探索,从而避免被许多无用的搜索路径所淹没。接着,蒙特卡洛树搜索算法就将登场啦!
使用MCTS的具体做法是这样的,给定一个棋面,MCTS共进行N次模拟。主要的搜索阶段有4个:选择,扩展,仿真和回溯

第一步是选择(Selection):这一步会从根节点开始,每次都选一个“最值得搜索的子节点”,一般使用UCT选择分数最高的节点,直到来到一个“存在未扩展的子节点”的节点
第二步是扩展(Expansion),在这个搜索到的存在未扩展的子节点,加上一个没有历史记录的子节点,初始化子节点
第三步是仿真(simulation),从上面这个没有试过的着法开始,用一个简单策略比如快速走子策略(Rollout policy)走到底,得到一个胜负结果。快速走子策略一般适合选择走子很快可能不是很精确的策略。因为如果这个策略走得慢,结果虽然会更准确,但由于耗时多了,在单位时间内的模拟次数就少了,所以不一定会棋力更强,有可能会更弱。这也是为什么我们一般只模拟一次,因为如果模拟多次,虽然更准确,但更慢。
第四步是回溯(backpropagation), 将我们最后得到的胜负结果回溯加到MCTS树结构上。注意除了之前的MCTS树要回溯外,新加入的节点也要加上一次胜负历史记录。
以上就是MCTS搜索的整个过程。这4步一般是通用的,但是MCTS树结构上保存的内容而一般根据要解决的问题和建模的复杂度而不同。
N(s,a) :记录边的访问次数; W(s,a): 合计行动价值; Q(s,a) :平均行动价值; P(s,a) :选择该条边的先验概率;
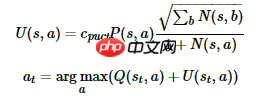

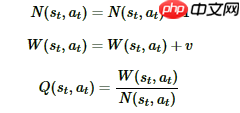
MCTS搜索完毕后,模型就可以在MCTS的根节点s基于以下公式选择行棋的MCTS分支了: 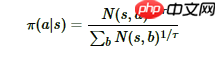
τ是用来控制探索的程度,τ的取值介于(0,1]之间,当τ越接近于1时,神经网络的采样越接近于MCTS的原始采样,当τ越接近于0时,神经网络的采样越接近于贪婪策略,即选择最大访问次数N所对应的动作。 因为在τ很小的情况下,直接计算访问次数N的τ次方根可能会导致数值异常,为了避免这种情况,在计算行动概率时,先将访问次数N加上一个非常小的数值(本项目是1e-10),取自然对数后乘上1/τ,再用一个简化的softmax函数将输出还原为概率,这和原始公式在数学上基本上是等效的。softmax()方法和get_move_probs()方法的代码分别如下:
def softmax(x):
probs = np.exp(x - np.max(x))
probs /= np.sum(probs) return probsdef get_move_probs(self, state, temp=1e-3):
"""按顺序运行所有播出并返回可用的操作及其相应的概率。
state: 当前游戏的状态
temp: 介于(0,1]之间的临时参数控制探索的概率
"""
for n in range(self._n_playout):
state_copy = copy.deepcopy(state)
self._playout(state_copy) # 根据根节点处的访问计数来计算移动概率
act_visits = [(act, node._n_visits) for act, node in self._root._children.items()]
acts, visits = zip(*act_visits)
act_probs = softmax(1.0/temp * np.log(np.array(visits) + 1e-10)) return acts, act_probs关键点是什么?
具体代码可以自行查看项目文件
%%writefile AlphaZero_Gomoku_PaddlePaddle/train.py#!/usr/bin/env python# -*- coding: utf-8 -*-# 对于五子棋的AlphaZero的训练的实现from __future__ import print_functionimport randomimport numpy as npimport osfrom collections import defaultdict, dequefrom game import Board, Game_UIfrom mcts_pure import MCTSPlayer as MCTS_Purefrom mcts_alphaGoZero import MCTSPlayerfrom policy_value_net_paddlepaddle import PolicyValueNet # paddlepaddleimport paddleclass TrainPipeline():
def __init__(self, init_model=None, is_shown = 0):
# 五子棋逻辑和棋盘UI的参数
self.board_width = 9 ###为了更快的验证算法,可以调整棋盘大小为(8x8) ,(6x6)
self.board_height = 9
self.n_in_row = 5
self.board = Board(width=self.board_width,
height=self.board_height,
n_in_row=self.n_in_row)
self.is_shown = is_shown
self.game = Game_UI(self.board, is_shown) # 训练参数
self.learn_rate = 2e-3
self.lr_multiplier = 1.0 # 基于KL自适应地调整学习率
self.temp = 1.0 # 临时变量
self.n_playout = 400 # 每次移动的模拟次数
self.c_puct = 5
self.buffer_size = 10000 #经验池大小 10000
self.batch_size = 512 # 训练的mini-batch大小 512
self.data_buffer = deque(maxlen=self.buffer_size)
self.play_batch_size = 1
self.epochs = 5 # 每次更新的train_steps数量
self.kl_targ = 0.02
self.check_freq = 100 #评估模型的频率,可以设置大一些比如500
self.game_batch_num = 1500
self.best_win_ratio = 0.0
# 用于纯粹的mcts的模拟数量,用作评估训练策略的对手
self.pure_mcts_playout_num = 1000
if init_model: # 从初始的策略价值网开始训练
self.policy_value_net = PolicyValueNet(self.board_width,
self.board_height,
model_file=init_model) else: # 从新的策略价值网络开始训练
self.policy_value_net = PolicyValueNet(self.board_width,
self.board_height) # 定义训练机器人
self.mcts_player = MCTSPlayer(self.policy_value_net.policy_value_fn,
c_puct=self.c_puct,
n_playout=self.n_playout,
is_selfplay=1) def get_equi_data(self, play_data):
"""通过旋转和翻转来增加数据集
play_data: [(state, mcts_prob, winner_z), ..., ...]
"""
extend_data = [] for state, mcts_porb, winner in play_data: for i in [1, 2, 3, 4]: # 逆时针旋转
equi_state = np.array([np.rot90(s, i) for s in state])
equi_mcts_prob = np.rot90(np.flipud(
mcts_porb.reshape(self.board_height, self.board_width)), i)
extend_data.append((equi_state,
np.flipud(equi_mcts_prob).flatten(),
winner)) # 水平翻转
equi_state = np.array([np.fliplr(s) for s in equi_state])
equi_mcts_prob = np.fliplr(equi_mcts_prob)
extend_data.append((equi_state,
np.flipud(equi_mcts_prob).flatten(),
winner)) return extend_data def collect_selfplay_data(self, n_games=1):
"""收集自我博弈数据进行训练"""
for i in range(n_games):
winner, play_data = self.game.start_self_play(self.mcts_player, temp=self.temp)
play_data = list(play_data)[:]
self.episode_len = len(play_data) # 增加数据
play_data = self.get_equi_data(play_data)
self.data_buffer.extend(play_data) def policy_update(self):
"""更新策略价值网络"""
mini_batch = random.sample(self.data_buffer, self.batch_size)
state_batch = [data[0] for data in mini_batch]
# print(np.array( state_batch).shape )
state_batch= np.array( state_batch).astype("float32")
mcts_probs_batch = [data[1] for data in mini_batch]
mcts_probs_batch= np.array( mcts_probs_batch).astype("float32")
winner_batch = [data[2] for data in mini_batch]
winner_batch= np.array( winner_batch).astype("float32")
old_probs, old_v = self.policy_value_net.policy_value(state_batch) for i in range(self.epochs):
loss, entropy = self.policy_value_net.train_step(
state_batch,
mcts_probs_batch,
winner_batch,
self.learn_rate * self.lr_multiplier)
new_probs, new_v = self.policy_value_net.policy_value(state_batch)
kl = np.mean(np.sum(old_probs * (
np.log(old_probs + 1e-10) - np.log(new_probs + 1e-10)),
axis=1)
) if kl > self.kl_targ * 4: # early stopping if D_KL diverges badly
break
# 自适应调节学习率
if kl > self.kl_targ * 2 and self.lr_multiplier > 0.1:
self.lr_multiplier /= 1.5
elif kl < self.kl_targ / 2 and self.lr_multiplier < 10:
self.lr_multiplier *= 1.5
explained_var_old = (1 -
np.var(np.array(winner_batch) - old_v.flatten()) /
np.var(np.array(winner_batch)))
explained_var_new = (1 -
np.var(np.array(winner_batch) - new_v.flatten()) /
np.var(np.array(winner_batch))) print(("kl:{:.5f},"
"lr_multiplier:{:.3f},"
"loss:{},"
"entropy:{},"
"explained_var_old:{:.3f},"
"explained_var_new:{:.3f}"
).format(kl,
self.lr_multiplier,
loss,
entropy,
explained_var_old,
explained_var_new)) return loss, entropy def policy_evaluate(self, n_games=10):
"""
通过与纯的MCTS算法对抗来评估训练的策略
注意:这仅用于监控训练进度
"""
current_mcts_player = MCTSPlayer(self.policy_value_net.policy_value_fn,
c_puct=self.c_puct,
n_playout=self.n_playout)
pure_mcts_player = MCTS_Pure(c_puct=5,
n_playout=self.pure_mcts_playout_num)
win_cnt = defaultdict(int) for i in range(n_games):
winner = self.game.start_play(current_mcts_player,
pure_mcts_player,
start_player=i % 2)
win_cnt[winner] += 1
win_ratio = 1.0 * (win_cnt[1] + 0.5 * win_cnt[-1]) / n_games print("num_playouts:{}, win: {}, lose: {}, tie:{}".format(
self.pure_mcts_playout_num,
win_cnt[1], win_cnt[2], win_cnt[-1])) return win_ratio def run(self):
"""开始训练"""
root = os.getcwd()
dst_path = os.path.join(root, 'dist') if not os.path.exists(dst_path):
os.makedirs(dst_path) try: for i in range(self.game_batch_num):
self.collect_selfplay_data(self.play_batch_size) print("batch i:{}, episode_len:{}".format(
i + 1, self.episode_len)) if len(self.data_buffer) > self.batch_size:
loss, entropy = self.policy_update() print("loss :{}, entropy:{}".format(loss, entropy)) if (i + 1) % 50 == 0:
self.policy_value_net.save_model(os.path.join(dst_path, 'current_policy_step.model')) # 检查当前模型的性能,保存模型的参数
if (i + 1) % self.check_freq == 0: print("current self-play batch: {}".format(i + 1))
win_ratio = self.policy_evaluate()
self.policy_value_net.save_model(os.path.join(dst_path, 'current_policy.model')) if win_ratio > self.best_win_ratio: print("New best policy!!!!!!!!")
self.best_win_ratio = win_ratio # 更新最好的策略
self.policy_value_net.save_model(os.path.join(dst_path, 'best_policy.model')) if (self.best_win_ratio == 1.0 and
self.pure_mcts_playout_num < 8000):
self.pure_mcts_playout_num += 1000
self.best_win_ratio = 0.0
except KeyboardInterrupt: print('\n\rquit')if __name__ == '__main__':
device = paddle.get_device()
paddle.set_device(device)
is_shown = 0
# model_path = 'dist/best_policy.model'
model_path = 'dist/current_policy.model'
training_pipeline = TrainPipeline(model_path, is_shown) # training_pipeline = TrainPipeline(None, is_shown)
training_pipeline.run()Overwriting AlphaZero_Gomoku_PaddlePaddle/train.py
!pip install pygame %cd AlphaZero_Gomoku_PaddlePaddle !python train.py
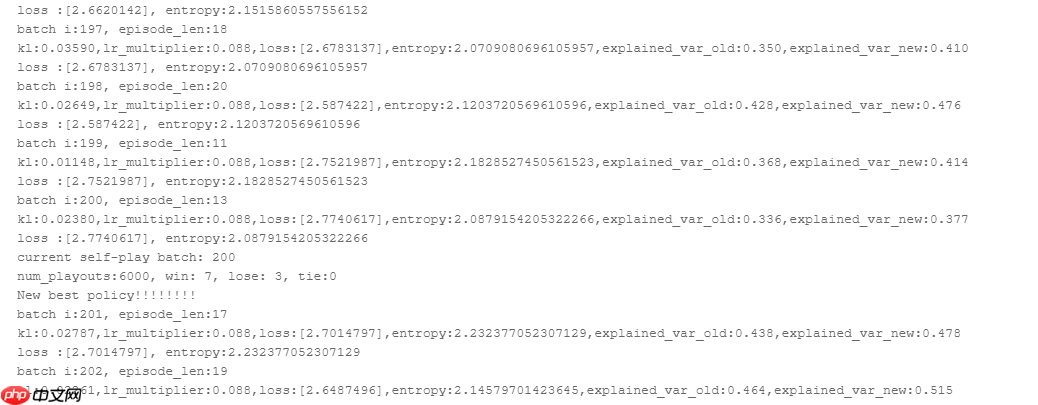
训练的截图,每隔一定步数会进行自博弈,评估网络并保留参数(这是加载过之前训练的参数的):
MuZero是AlphaZero的后继者。与AlphaGo和AlphaZero相似,MuZero也使用MCTS汇总神经网络预测,并选择适合当前环境的动作。但MuZero不需要提供规则手册,只需通过自我试验,便能学会象棋围棋游戏和各种Atari游戏。除此以外,它还能通过考虑游戏环境的各个方面来评估局面是否有利以及策略是否有效,并可通过复盘游戏在自身错误中学习。
以上就是用飞桨框架2.0造一个会下五子棋的AI模型的详细内容,更多请关注php中文网其它相关文章!

每个人都需要一台速度更快、更稳定的 PC。随着时间的推移,垃圾文件、旧注册表数据和不必要的后台进程会占用资源并降低性能。幸运的是,许多工具可以让 Windows 保持平稳运行。

 广告
广告Copyright 2014-2025 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号








 783
783






















